【食品工場】絡まる麺をどう捌く?イシダの「空飛ぶ組合せ計量」ロボット
今回ご紹介するのは、令和7年度 全国発明表彰において「経済産業大臣賞」を受賞した、株式会社イシダによる画期的な発明「物品排出システム(特許第7161207号)」です。
コンビニのパスタや調理麺、あるいは精肉といった「粘着性が高く、絡まりやすい食材(難搬送性ワーク)」。これらを人手を使わずに、高速かつ正確なグラム数でパック詰めする技術は、食品業界の悲願でした。
「ロボットハンドの中で計量と計算を済ませてしまう」という逆転の発想で解決した、その驚きの仕組みを解説します。
【課題】「ネバネバ・ベタベタ」は機械の大敵
食品工場において、スナック菓子のような「サラサラした個体」の自動計量は得意分野でしたが、調理済みのうどんや、水分を含んだカット野菜、生肉などは非常に厄介な存在でした。
従来の振動フィーダ(震える皿)を使う方式では、粘着性のある食材同士が絡まり合い、巨大な塊(団子状態)になって一度にドサッと落ちてしまうなど、正確な計量が困難でした。
このため、これまでは多くの作業員がラインに立ち、手作業で計量・盛り付けを行わざるを得ず、人手不足や衛生面のリスクが課題となっていました。
【解決策】掴んでから考える!「空中計量」システム
この課題を解決したのが、イシダが開発した新しいロボットシステムです。最大の特徴は、ロボットの「手(把持器)」自体が、独立した小さな計量器の集合体になっている点です。
1. 「針」で刺して持ち上げる(絡まりの解消)
まず、食材を移動させる方法として「振動」ではなく「把持(掴む)」方式を採用しました。
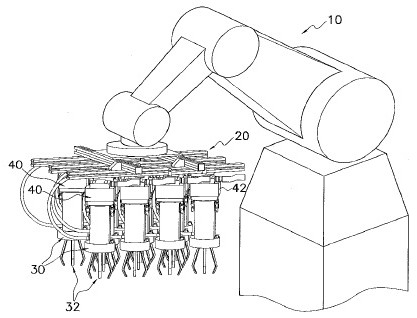
図1をご覧ください。ロボットの手先には、複数の筒状の「把持ユニット(30)」がついています。それぞれの先端には、複数の「針(爪部32)」が装備されています。 この針を食材(麺など)に突き刺すことで、絡まった麺をほぐしながら、一定量だけを確実にピックアップします。
2. 空中で重さを測り、最適な組合せを選ぶ
ここからがこの特許の真骨頂です。それぞれの把持ユニット(30)には、個別に重量センサが内蔵されています。
ロボットが食材を持ち上げた瞬間、例えば「1番の針は20g」「2番の針は15g」……といった具合に、掴んだまま空中でそれぞれの重さを計測します。 そして、目標の重量(例:100g)に最も近くなる組み合わせを瞬時に計算します。
3. 選ばれた食材だけを落とす(組合せ排出)
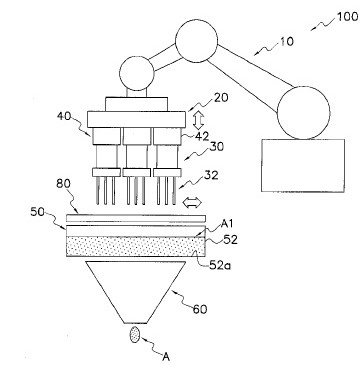
ロボットが包装用の漏斗(ファンネル)の上に移動したとき、計算で「選ばれたユニット」だけが針を引っ込めて食材を投下します。
4. ネバネバ食材を「強制的に」落とす工夫
しかし、非常に粘り気が強い食材は、針を引っ込めただけでは針にくっついて離れないことがあります。 そこで本装置では、「ストリッパ(部材80)」と呼ばれる固定パーツが重要な役割を果たします。
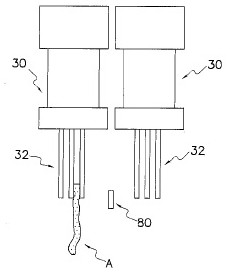
図3に示すように、針(32)が上に引き抜かれる際、部材80が「壁」となって食材(A)を物理的に押さえます。 これにより、どんなにベタつく食材でも確実に「剥がし落とす」ことができ、正確な計量を実現しています。
通常、「組合せ計量機」は床に置かれた巨大な装置で行うものですが、この発明は「ロボットハンドそのものを計量機にしてしまった」点が革命的です。
- 従来のロボット: 掴む → 運ぶ → 置く(運搬だけの単純作業)
- 本特許のロボット: 掴む → 空中で重さを測る → 計算する → 必要な分だけ落とす
つまり、移動時間を「計算・計量時間」として有効活用しているため、圧倒的な処理速度を実現できるのです。イシダのお家芸である「組合せ計量」のロジックを、ロボット制御に見事に融合させた発明と言えます。
【効果】食品工場の風景が変わる
この技術の導入により、以下のような効果が実現されています。
- 難搬送物の自動化: これまで機械化を諦めていた「くっつく・絡まる」食材の自動計量が可能になりました。
- 歩留まりの改善: 「多めに入れないとクレームになる」という過量充填のムダを、精度の高い組合せ演算で極小化し、原材料コストを削減します。
- 衛生と省人化: 人が食材に触れる工程を減らし、異物混入リスクを低減。深刻な人手不足の解決策となります。
特許情報まとめ
| 発明の名称 | 物品排出システム |
|---|---|
| 特許番号 | 特許第7161207号 |
| 特許権者 | 株式会社イシダ |
| 発明者 | 前田 修一、大林 勇次郎、北條 正晃 |
| 出願日 | 令和1年6月21日 (2019.06.21) |
| 登録日 | 令和4年10月18日 (2022.10.18) |
| 受賞歴 | 令和7年度 全国発明表彰 経済産業大臣賞 ※併せて「発明実施功績賞」を受賞 |
| 関連リンク |
Google Patentsで全文を読む J-PlatPatで公報・経過情報を確認 |