【自動車・モビリティ】ペダル反力をねじ伏せる!堀場製作所の「自動運転ロボット固定技術」
今回ご紹介するのは、令和7年度 近畿地方発明表彰において「京都発明協会会長賞」を受賞した、株式会社堀場製作所の「保持装置及びそれが備える搭載台の固定方法(特許第7008615号)」です。
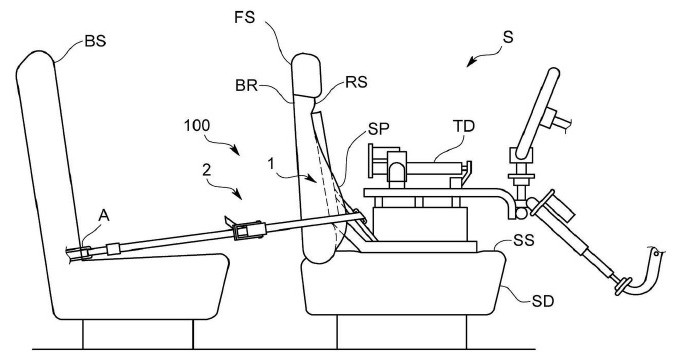
自動車の開発現場では、燃費や排ガスを正確に測定するため、シャシーダイナモメーター(車両試験機)の上で人間の代わりに「自動運転ロボット」がアクセルやブレーキを操作します。しかし、柔らかい車のシートの上に重いロボットを置き、強い力でペダルを踏み込ませると、ロボット自体がズレてしまうという難題がありました。
本特許は、シンプルな「ベルトの取り回し」と「力のベクトル」を巧みに操ることで、どんな車種のシートでもロボットをピタッと微動だにせず固定できる、力学センスの光る機械設計技術です。
【課題】ペダルを踏む「反力」でロボットが浮き上がってしまう
自動運転ロボットは、人間と同じように運転席に座り、アームを伸ばしてペダルを操作します。特に急ブレーキの試験などでは、ペダルを強く踏み込むため、その「反作用(反力)」として、ロボット自身を後方および上方へと押し上げる強大な力が働きます。
車のシートは人間が快適に座れるようにクッション等の柔らかい素材で作られているため、ただロボットを置いただけでは反力に負けてシートに沈み込み、姿勢が崩れてしまいます。ロボットの姿勢がズレると、ペダルを踏み込む量やタイミングに誤差が生じ、ミリ単位の精度が求められる試験データが台無しになってしまいます。
かといって、車種ごとに専用の金属製固定具を作ったり、シートを取り外してロボットを直付けしたりするのは、試験の準備に膨大な手間とコストがかかるというジレンマがありました。
【解決策】「斜め下」へのテンションで座面と背もたれに同時圧着
堀場製作所は、複雑な固定具を使わず、「L字型の搭載台」と「ベルトを引く方向(ベクトル)」の最適解を見つけることでこの課題を解決しました。
1. L字型搭載台と絶妙な「ガイド部」の配置
本技術では、ロボットを乗せるための「座面部(11)」と「背面部(12)」からなるL字型の搭載台(1)を使用します。
ポイントは、ベルト(2)をどこに通して引っ張るかです。この発明では、座面部と背面部が交わるヒンジ付近の「背面部の両サイド」に、ベルトを通すためのガイド部(131)を設けています。ベルトは背面部の裏側を通ってこのガイドを抜け、後部座席の下にあるISOFIXなどのアンカー(固定金具)に繋がれます。
2. 1本のベルトで「2方向」の力を生み出す力学マジック
このベルトをアンカーに向かってピンと張ると、搭載台には物理学的に非常に理にかなった力がかかります。
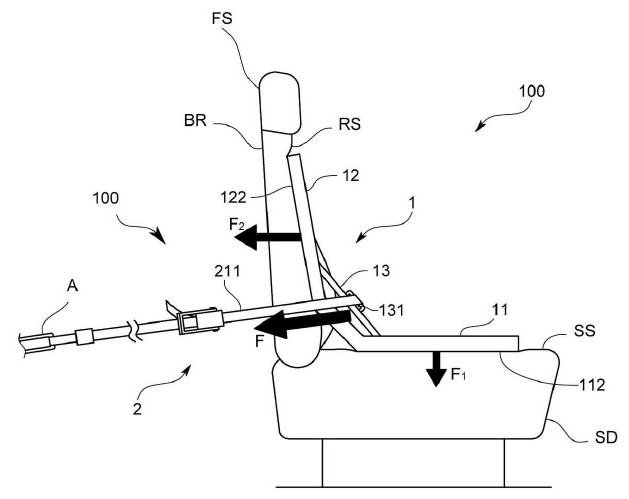
図2に示されるように、ベルトが斜め後ろ下方に引っ張られる張力(F)は、物理のベクトル分解により、「座面をシートに押し付ける下向きの力(F1)」と「背面部を背もたれに押し付ける後ろ向きの力(F2)」の2つに分かれます。
これにより、ペダルを踏んだ時に発生する「上へ逃げようとする力」は下向きの力(F1)で抑え込み、「後ろへ逃げようとする力」はシートの背もたれに食い込ませる力(F2)でガッチリと受け止めることができます。複雑な機構を使わず、ただベルトを締めるだけで、柔らかいシートの上でもロボットが微動だにしない強固な土台が完成するのです。
この特許の最も秀逸な点は、「複雑な反力を、たった1本のベルトの取り回し(ベクトルの方向)だけで完全にねじ伏せた」ことです。専用の金具や大掛かりなフレームを必要とせず、既存のシートとアンカーをそのまま利用できるため、どんな車種にもすぐに対応できる圧倒的な汎用性を生み出しています。
【効果】正確なデータ計測と、現場の「働き方改革」を実現
この保持装置により、自動車試験の現場に以下のような劇的な効果がもたらされます。
- 極めて高精度な試験データの取得: ロボットの姿勢が全くブレないため、人間以上に正確で再現性の高いペダル操作が可能になり、燃費や排ガスデータの信頼性が向上します。
- 設置作業の大幅な時短(現場の負担軽減): シートを外したり複雑な調整をしたりする必要がなく、搭載台を置いてベルトを締めるだけで設置が完了するため、テスト準備の時間を大幅に削減できます。
- 多様な車種への優れた汎用性: 軽自動車から大型SUVまで、あらゆる形状のシートにそのまま適用できるため、テスト設備の運用コストを抑えることができます。
新しい車が世に出るための厳しい試験を、縁の下で支えるテストロボット。その性能を100%引き出すための「シンプルで美しい固定術」は、京都発明協会会長賞の受賞にふさわしい、洗練された機械設計の結晶です。
【補足】この記事で登場した技術キーワード
- シャシーダイナモメーター
- 車両を回転するローラーの上に乗せ、室内で実際の走行状態(負荷)を再現して燃費や排ガス、動力性能などを測定する試験装置です。気候や路面状況の影響を受けずに、一定の環境下で繰り返し精度の高いデータを取得できるため、自動車の開発・認証には不可欠な設備です。
- 作用・反作用の法則(ニュートンの第3法則)
- 一つの物体が他の物体に力を及ぼすとき、それと同時に、もう一方の物体からも同じ大きさで反対向きの力が返ってくるという物理法則です。ロボットがペダルを前方に踏み込む力(作用)が発生すると、その瞬間にペダル側からロボットを後方に押し返す力(反作用・反力)が必ず発生するため、この力をいかに相殺して姿勢を保つかが装置設計の肝となります。
- ベクトルの分解
- ある方向に働く一つの力を、物理的な解析がしやすい特定の方向(垂直方向や水平方向など)の成分に分けて考える手法です。斜め後ろ向きに働く張力を「下向きの力」と「後ろ向きの力」として分解し、それぞれの成分を物体の「圧着」や「保持」に有効利用することで、大掛かりな固定具を使わずに安定した構造を実現できます。
特許情報まとめ
| 発明の名称 | 保持装置及びそれが備える搭載台の固定方法 |
|---|---|
| 特許番号 | 特許第7008615号 |
| 特許権者 | 株式会社堀場製作所 |
| 発明者 | 松原 由明、古川 和樹 |
| 出願日 | 平成30年12月12日 (2018.12.12) |
| 登録日 | 令和4年1月13日 (2022.1.13) |
| 受賞歴 | 令和7年度 近畿地方発明表彰 京都発明協会会長賞 |
| 関連リンク |
Google Patentsで全文を読む J-PlatPatで公報・経過情報を確認 |